Testing Custom Flight Control Code: Simulation & Integration
By Avionics Team | February 20, 2025
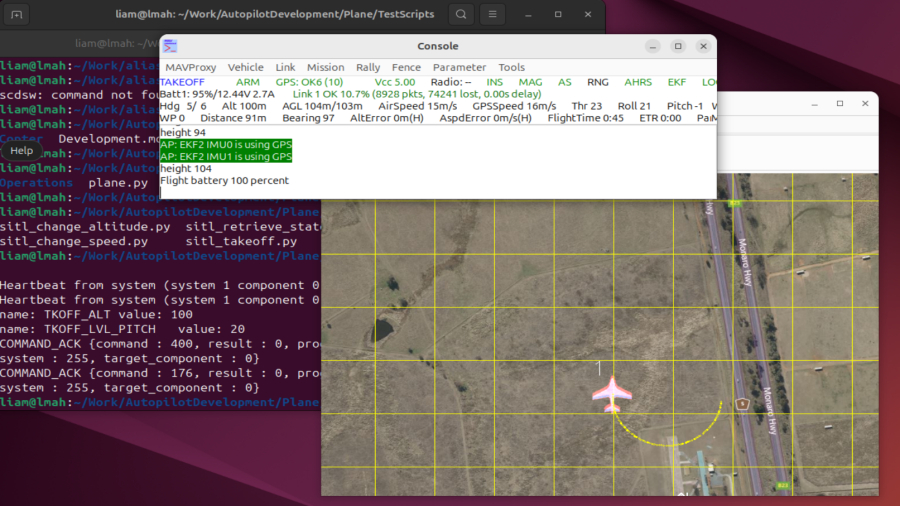
Preparing code for actual plane integration
To ensure our custom flight control code operates seamlessly, we conducted extensive testing in a Software-in-the-Loop (SITL) simulation environment. Using ArduPilot, MAVLink, and MAVProxy, we validated key functionalities, including speed regulation, automated takeoff sequences, flight mode transitions, and precise waypoint navigation. Through multiple test cycles, we identified areas for optimization, particularly improving the aircraft's stability and responsiveness under varying conditions such as sudden wind changes and altitude fluctuations.
We also integrated the refined flight control code into our Ground Control Station (GCS) for real-time monitoring and adjustments, enhancing usability and streamlining the control interface for operators. This integration allowed us to fine-tune flight parameters more efficiently while enabling continuous telemetry feedback on aircraft performance and path deviations. With these refinements, we are now well-positioned to transition into real-world field testing, ensuring the system is ready for deployment as a reliable and adaptive autonomous flight solution, with improved precision and efficiency in aerial navigation.
Key Achievements:
- Validated flight control functionalities using SITL simulation.
- Tested speed, altitude, takeoffs, flight modes, and waypoints.
- Integrated features into the Ground Control Stations (GCS)
- Ensured code reliability for aircraft implementation.