Custom Autopilot Integrations
By Avionics Team | December 20, 2024
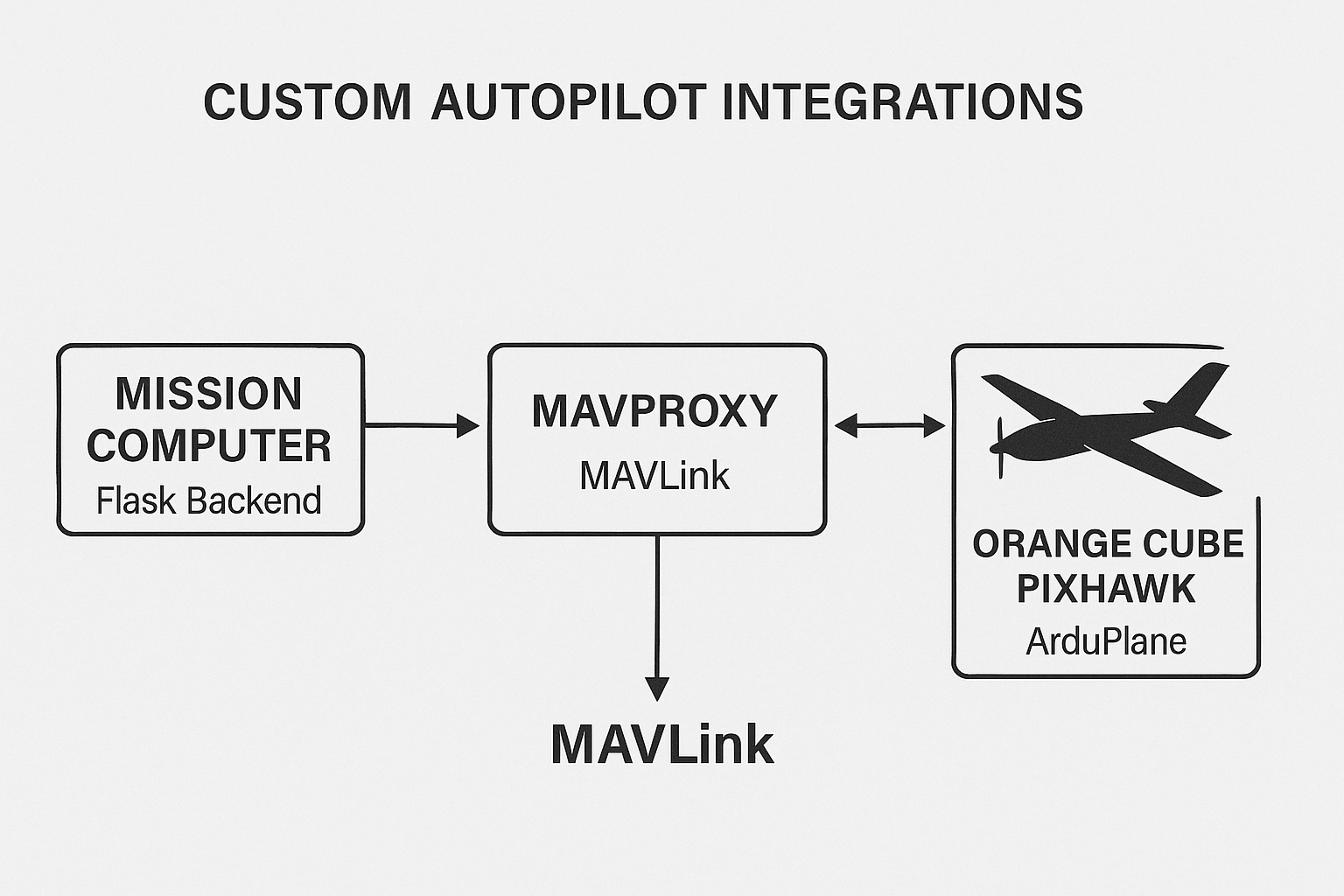
As part of our flight control system for SUAS 2025, the Avionics Team has completed the core integration between our onboard mission computer and the Orange Cube Pixhawk flight controller. This connection uses a serial link running MAVProxy to facilitate reliable MAVLink messaging with ArduPlane. Through this layer, we’ve built a robust interface that supports full autonomous command and telemetry feedback.
System Architecture:
Our mission computer runs a Flask-based backend and communicates directly with the Pixhawk over a wired serial connection. MAVProxy handles all low-level MAVLink communication, allowing us to issue high-level commands while maintaining full telemetry access in real time. This architecture enables mission execution without reliance on external GCS tools during flight.
Implemented Features:
- Flight Mode Switching: Transitioning between Manual, Auto, FBWA, Guided, Loiter, and RTL modes.
- Altitude Control in Guided Mode: Dynamically adjust altitude to match terrain or mission needs.
- Fly-to Coordinate Commands: Send direct GPS positions for on-demand rerouting in Guided mode.
- Speed Control: Adjust target cruise speed during flight to optimize accuracy and energy use.
- Vehicle Arm/Disarm: Full arm/disarm functionality remotely or through automation routines.
- Telemetry Monitoring: Receive continuous heartbeat messages containing GPS location, attitude, battery levels, and flight status.
Custom Mission Upload Logic:
Our most critical capability is the autonomous payload drop sequence. From a detected target coordinate, our system generates and uploads a custom mission with two key waypoints:
- Entry Waypoint: Placed upstream of the target to stabilize the aircraft and reset attitude (zero roll, pitch, yaw) before final approach.
- Drop Waypoint: Located just before the target, used to initiate the drop while maintaining low altitude and low speed. The payload is released when the aircraft is approximately 20 meters away from the target point.
This approach maximizes drop accuracy by ensuring the aircraft is in a known, consistent state at the moment of release. The logic also accounts for aerodynamic delay and ensures the payload impacts as close to the target coordinate as possible.
All autopilot communication is modular and extensible, making it easy to add future commands or modify logic without rewriting the interface. This messaging layer is a core part of our autonomous flight control system and supports our long-term goal of precision, real-time aerial autonomy.